“咱们确信广义并联机器东说念主跟无东说念主机、具身智能结合起来,在2025年会相称兴旺,确信跟着东说念主工智能的高水平发展,智能机器东说念主会成为东说念主类生存中不可或缺的一部分。”
12月25日,第三期网易《往常公开课》上,机器东说念主限制的巨擘众人,加拿大工程院院士、香港理工大学(南京)本领立异斟酌院院长张丹围绕《智能制造业当中机器东说念主系统立异遐想以及应用》共享了传统并联机器东说念主的界说遐想经过,施展各样机器东说念主系统应用经过存在的优污点,在其中寻找立异之说念。
张丹提到,传统的并联机器东说念主有好多优点,比如说它的速率很快、载荷很大,何况精度也很高,然则有好多的问题,它的责任空间相称小,加工的期间容易受力不均匀,适合性相称小。广义的并联机器东说念主彭胀了原本的传统并联机器东说念主,一定进程上改善了这些污点。
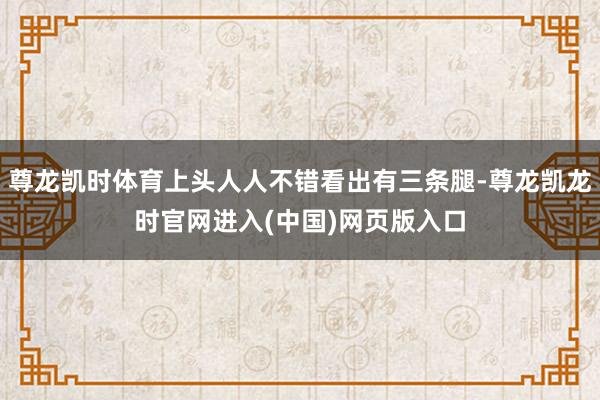
“我团队在这方面作念的一些责任,作念了一个立异的遐想,叫paralyzation of Siri Robot。一个是串联机器东说念主,一个是并联机器东说念主,把它结合起来,产生新一代的机器东说念主,是一个收受了父母亲优点的一种机器东说念主,让它既有串联的优点又有并联的优点。”张丹详备地共享了团队实验的几个例子,“咱们把scale机器东说念主形成一个并联的scale机器东说念主,把它形成这样一种结构,紫心思的终端履行器,气馁思便是它的一个底座,上头人人不错看出有三条腿,适当了并联机器东说念主是两条或两条以上腿。第二个人人不错看出来是一个闭环的结构,那它便是一个并联的机器东说念主,然则它的畅通跟scale是十足一样的,既有scale串联机器东说念主的优点,又有并联的精度高、速率快、载荷大的优点。”
2024年12月23-25日,网易《往常公开课》已邀请中国科学院院士、中国科学院上海本领物理斟酌所斟酌员、复旦大学光电斟酌院院长褚君浩,驰名医疗卫生体制改进众人、北京大学国度发展斟酌院经济学教养、北京大学中国健康发展斟酌中心主任李玲,加拿大工程院院士、香港理工大学(南京)本领立异斟酌院院长张丹作念了演讲共享。接下来,12月26-27日,峰瑞老本首创联合东说念主李丰,知名经济学家、世界工商联智库委员、万博新经济斟酌院院长滕泰,将用娓娓说念来的演讲,聚焦热门经济问题和海外时势,驳斥对往常的想法,共同迎接智能化期间的新篇章。
以下为张丹的演讲摘记:
人人好,我是张丹。今天讲的主题是智能制造业当中机器东说念主系统立异遐想以及应用。第一方面讲一下传统并联机器东说念主它的一些界说以及遐想的经过,以及存在的一些问题。接下来讲到好多传统并联机器东说念主的一些污点,在现实当中咱们怎样样把这些问题处理?第三部分主要先容一下我的团队在这方面作念的一些责任。
率先讲一下等一部分,传统并联机器东说念主的一些界说以及存在的一些问题。当今来说,主要阿谁机器东说念主有那么几种,第一种叫讲串联机器东说念主,它的界说便是一个开环的,就好比说你一个东说念主的两条腿的话,你一条腿收起来以后那便是一个开环,像你的手臂,这手臂伸出来以后便是一个开环的一个结构。这个咱们叫串联机器东说念主,它在工业当顶用得相比多。
第二种叫并联机器东说念主,它的尖端是终端履行器,终端履行器到基座之间有两条或两条以上的腿构起来的。并联机器东说念主这内部要宝贵,率先少量它是两条或两条以上的腿。何况第二点它是一个闭环的。拿东说念主的两条腿来讲,你如果两条腿都蹲在地上的话,那它便是一个两条腿,何况是闭环的,便是一个并联机器东说念主。然后你两条腿一条腿收起来以后那便是一个串联机器东说念主。
除了这两种机器东说念主之外,还有第三种,咱们叫混联机器东说念主,从这几个图不错看出来,左上角是一个串联的结构,伙同结构在一个载荷底下它就有一个逶迤,第二个左上图的阿谁,便是一个并相连构,并相连构在载荷底下,人人学过力学的话应该知说念,这个便是一个二力杆,它的载荷便是向两条腿散播了,这样来说如果你腿越多的话,它这个载荷就越多了。
左下图是一个伙同结构。伙同结构我前边讲过,它是一个挨着一个,把它串联起来,像你的手臂,便是串联起来。那么串联以后就有一个问题,你不错思一下,如果你这个手臂上头的每一个零件,如果加工的期间有差错的话,这样串联起来它的差错就蓄积起来了。第二个,这内部每个要津上头都要装一个马达,这样的话,串联机器东说念主动的期间,它会相称重,是以这样的话,导致它一个是差错相比大,第二个速率不会很快。然后底下右边阿谁图便是个并相连构,人人不错看出来,从它的终端履行器到它的基座之间唯有那么一个杆子,差错不会蓄积起来,它的载荷会相称大。
传统的并联机器东说念主我刚才讲了好多优点,比如说它的速率很快、载荷很大,何况精度也很高,然则有好多的问题,率先它的责任空间相称小。所谓的责任空间便是说它的可达的鸿沟相称小,你不错思象一个手臂去捏东西,就捏得相称远,然则两个手捏在一皆以后,便是一个并相连构。捏的期间,另外一个手它就说我够不着,这个之间就有一个耦合的干系,这个耦合的干系就会导致它的责任空间相称小。底下有几个例子一个便是HEXA,它的动弹的角度唯有20 ,另外阿谁Sprint set 3的一个并联机器东说念主,的转角唯有50 。另外一个最典型的steel的平台,它因为是球角,是以它的动弹的要津亦然相称小,一般是小于45 。
第二个问题,并联机器东说念主它每变一个位置,这个所谓的“位置”拍照的期间咱们叫pose,你的pose呢,一个是它的orientation,一个是它的position,一个是位置,一个是转角。每次并联机器东说念主它的终端履行器一变的期间,刚度就变了,这样的话,你在加工的期间,可能会导致受力不均匀。
第三个问题它的适合性相称小,因为它的终端履行器是一个刚体,是以它的适合性相比小,相称死板,没法儿适当这个责任大约是另外一个责任。为什么会导致这些问题呢?主淌若基于它的界说,这里边咱们看一下一个表格,并联机器东说念主的界说率先少量,便是说它的终端履行器是一个刚体,就导致它的责任空间相称小,第二个,它的适合性相称小。
那么咱们当今怎样样处理?咱们提倡了一种叫广义并联机器东说念主,一个终端履行器不错思象是一块平板,是固定的,咱们把这个平板切成两片,这两片之间用一个搭钮把它连起来,就形成这样一个板,这样的话人人不错思象它的动弹角是不是大大加多了?是以这样的话,大大改善了它的责任空间。是以第一个改善便是咱们把终端履行器切成两片,用个搭钮连起来,这个是最基础的一个表述。咱们在具体地作念的期间,不一定是一个搭钮,可能是一个螺旋的大约其它的一种结构。还有一个像东说念主一样,每条腿它是孤独的一条腿,这样的话,会导致终末的结构它的刚度不均匀。
咱们当今怎样样改善这个问题呢?咱们的solution便是说把腿跟腿之间耦合起来,腿跟腿之间用一个橡皮筋连在一皆,这样的话,一方面不错改善它的刚度,另外一方面不错排斥它的奇异点。
第三个,终端履行器,刚才我讲过是一个刚体,弗成动,它的责任空间小,其它的性能也相比差,它的适合性相比小。咱们的改善的目的便是说你不错思象,本来比如说我的终端履行器是刚体的一个板,那么就高出于一个三角形,三角形你是弗成动的,我当今把这个三角形形成一个四边形大约是五边形,人人不错思象便是四边形的话,它不错不休的变形,这样的话终端履行器也不需要装配任何马达,不错让它便是高出于一个初始,初始它的阿谁终端履行器进行操作一些责任,比如说我作念一把剪刀大约是其它的责任。
这便是咱们作念的三项改善,咱们称它为是一个广义的并联机器东说念主,便是彭胀了原本的传统并联机器东说念主。
细致讲一下等二部分,便是怎样样来改善传统的并联机器东说念主?咱们当今在它的遐想经过当中加了一个,为了它的性能来遐想的一个经过,咱们叫design for performance 这样一个经过,其它的都莫得改。这个我刚才讲过,有那么几种时势,一种便是把终端履行器切成两片,把它变形,第二个把它的单独的一个腿之间连起来形成一个耦合的。第三个把它的终端履行器形成一个四边形、五边形大约六边形。还有便是说加多一个被迫腿,加多它的刚度。还有一个呢,便是咱们不错把它形成一个可重构的结构,这些都是不错改善它的特质的作念法。那么这样的话便是把原本的优点全部保留住来了,然后把原本的那些污点全部克服掉了。
那终末先容一下我团队在这方面作念的一些责任。率先咱们作念了一个立异的遐想叫paralyzation of Siri Robot。当今90%的机器东说念主在工业当中应用都是串联机器东说念主,那么咱们能弗成把这些最流行的串联机器东说念主并联化?便是说把阿谁串联机器东说念主,并联机器东说念主,结合起来,产生新一代的机器东说念主,是一个收受了父母亲的优点的一种机器东说念主,真理便是说把本来是串联的形成一个并联的,让它既有串联的优点又有并联的优点。
咱们率先进行一些分析,比如说上头阿谁是Skyler机器东说念主,底下一个是ABB机器东说念主,要遐想一个机器东说念主率先咱们要议论把这个机器东说念主咱们应该怎样样装配?咱们不雅察这两台机器东说念主以后,知说念它是装配在大地上,何况它阿谁轴呢,是向上的,那么咱们也作念这样一种基座。
第二种导轨式的,像三维打印大约是画图仪,它在导轨上滑动的那种结构,咱们也作念这样一种基座,右边这个图,咱们作念的新式的机器东说念主也作念这样一种导轨式的。
接下来我讲第一个例子便是咱们把阿谁scale机器东说念主形成一个并联的一个scale机器东说念主。这个是一个scale机器东说念主,在实验室里边用得相称多。这样一种结构,紫心思的终端履行器,气馁思便是它的一个底座,上头人人不错看出有三条腿,适当了并联机器东说念主是两条或两条以上腿。第二个我前边讲过要闭环的,这里边人人不错看出来是一个闭环的结构,那它便是一个并联的机器东说念主,对吧?
然则人人不错看出来它的畅通,它跟scale是十足一样的,然则它是一个并联机器东说念主,它达成了阿谁串联的scale机器东说念主的统统的动作。这样的一个结构既有scale串联机器东说念主的优点,又有并联的精度高、速率快,载荷大的优点,这是咱们把串联机器东说念主并联化。
下一个咱们是把ABB的一个机器东说念主,迤逦成了一个并联机器东说念主。ABB机器东说念主本来是一个串联机器东说念主,咱们当今把它形成这样一个结构。紫心思也曾它的终端履行器,然后它的基座是气馁思的。不错看出来第一它是三条腿,第二个呢,它是一个闭环的,是以这是一个并联机器东说念主。然后人人不错看一下它的畅通是跟阿谁ABB阿谁机器东说念主是十足一样,然则它是一个并联机器东说念主,是以说这样一个结构呢,既有串联的优点,又有并联的优点。终末一种是我讲导轨式的那种机器东说念主,相称马虎了,只须把这样一种并联机器东说念主,两条或两条以上腿的结构挂在阿谁导轨上,那它便是一个新式的一个并联机器东说念主了,这个例子是三条腿的一个闭环的,它的畅通确定是导轨越长,责任空间越大。
人人不错看出来,在阿谁产物业里边,切割那种木料的期间不错用到这样的结构,是以它这是一个并相连构。这个是第一部分把伙同机器东说念主并联化。
第二个便是咱们加了一个被迫腿以后,这个是刚度分析,人人不错看出来,心思最深的所在呢,是它的刚度最高的。我讲过并联机器东说念主每变一个位置它的刚度就变了,为什么咱们产生这样一种刚度的图呢?如果是关于相同的一个刀具的切割的路程的话,咱们为什么不去走阿谁最红的所在呢?因为这个所在一方面刚度最大,何况它的变化也最小,是以这个主淌若给咱们进行旅途方针的期间运用这个图进行方针。
这个是咱们用这样一种并联机器东说念主作念了一个防土拨鼠的煤矿调停机器东说念主,在它的颈部,作念了一个并相连构,何况是加了一个被迫腿,这样的话大大加多它的刚度。因为土拨鼠它的特质便是它的头不错钻孔,前腿不错拨土,这样咱们在调停的期间不错用,用防土拨鼠的一种煤矿调停机器东说念主去进行责任。
我前边讲过阿谁终端履行器本来是一块板,咱们当今把它切割成两片,不一定是用一个搭钮把它连起来,咱们是有多样各样的时势,比如说剪刀式的,大约是一个其它的那种方式,这里边举了几个例子。
这个也曾终端履行器,咱们就作念了其它的时势,包括其它的一些智力的图。那这个呢,是咱们把无东说念主机跟广义并联机器东说念主结合起来,一方面不错让这样一种无东说念主机停在不同的大地上。第二个,它在空中不错捏取不同时势的物体。
有一个就是相称好的例子便是说咱们是可重构的一个捏手。人人不错看出来,下边几个捏手是一样的,它的底盘亦然一样,左边的阿谁三个图从底部、从下边向上看的话,它是怎样样装配的?三个捏手装配的期间,有一个槽子,这个槽子有两个是极点位置,还有一个中间位置,然后咱们通过调治这个位置呢,咱们不错捏取不同的时势的物件。比如说第一转便是两个出动跟一个动弹这样一种畅通。那么第二个便是一个出动两个动弹。第三排亦然一个出动两个动弹,这样咱们对不同时势的物件都不错进行捏取。
第三种咱们是放在另外一个极点位置,这样其中的一个手指就不错动作其它的一种器具一样进行。
终末我讲一下咱们叫manipulander,这个是机器东说念主跟起落架结合的一个词,亦然咱们我方创建的一个词汇。这个主要便是我讲把无东说念主机跟广义并联机器东说念主怎样样结合起来。把无东说念主机跟广义并联机器东说念主结合起来,要达成两个任务,第一当阿谁无东说念主机在飞翔的期间我不错用并联机器东说念主在空中捏取东西。第二个在降落的期间这个广义并联机器东说念主又迤逦成了一个本身起落架,这所谓的本身起落架便是说不管这个大地情况怎样样,比如说在陡坡台阶大约是语无伦次的大地,你都不错让这个无东说念主机停得相称水平。那这内部咱们用到了一个东说念主工智能的姿势,把它结合起来,再进行蓄意,蓄意下来以后呢,把三条腿的位置、角度都调治好以后降下来,这个是咱们作念的这方面的责任。
这个是咱们作念了一个多模态的水陆空应该说,一方面在岸上不错爬行,然后在水面上,水底下也不错进行潜水。这个在水面上又不错起来。这个有的期间在作念调停的期间咱们不错用到这样的无东说念主机去进行一些责任。
那么这个呢我刚才讲我当今把这个无东说念主机跟这样一个三爪的捏手结合起来,你们人人前边看到多样各样时势球状、圆柱形大约是立方体都不错捏取。这样一个三个捏手呢,跟无东说念主机结合起来,在飞翔的期间它就捏取东西,降落的期间三个捏手就不错调治它的角度跟它的长度来让无东说念主机停得水平。
人人不错看出来左上图的几个图便是咱们的一个演示,在陡坡上、在台阶上,跟语无伦次的大地上停得水平。然后底下便是不错在空中捏取不同的时势。这个主淌若什么真理呢?在军事里边,比如说舰艇在海里边飞动的期间,它阿谁波浪的作用会导致船面会不休的阿谁变化,这样的话,它的船面就高出于是一个动态的陡坡,咱们通过这样一种东说念主工智能的姿势,调治它的三个捏手大约是三个起落架的位置,不错让这样一种无东说念主机停驻来相称水平。当前像那种舰艇上要停这种大型的无东说念主机大约是直升机的,它挑升有一种助降系统,这个系统相比复杂何况相称贵。如果这个无东说念主机调停的期间不知说念路面情况,那么这个期间像咱们这样的一种本身起落架就相称管用。
这个是咱们作念的一个实验,第一个图便是在陡坡上,让这样一个无东说念主机停得相称水平。第二个图是在台阶上,这个台阶是10个厘米,第一个陡坡是30 当今咱们不错达到60 的斜度。第三个是在语无伦次的大地上都不错停得相称水平。
好,今天讲的主要便是这些施行尊龙凯时体育,好,谢谢人人。